From Singer Avenue in Lemont, Illinois to the Moon and beyond – the incredible journey of Singer sewing machines! 🌕✨
Discover the fascinating story of how this seemingly ordinary street played a pivotal role in space exploration. It all started with Horace Singer, who initially came to Lemont to work on the Illinois and Michigan Canal but stumbled upon a valuable resource – limestone. This limestone would later be used to construct iconic Chicago buildings, including the historic Water Tower.
But the real game-changer was the invention of a powerful drilling tool by Horace Singer’s uncle, Isaac Singer. This tool revolutionized the excavation of the canal, allowing large amounts of limestone to be extracted efficiently. Isaac Singer, after amassing considerable wealth, ventured into acting briefly before focusing on perfecting the sewing machine.
The Singer sewing machine became a pivotal tool in the hands of aviation pioneers Wilbur and Orville Wright, helping them craft the first airplane. Parts of this groundbreaking aircraft even found their way onto early space missions, including the Apollo missions to the Moon.
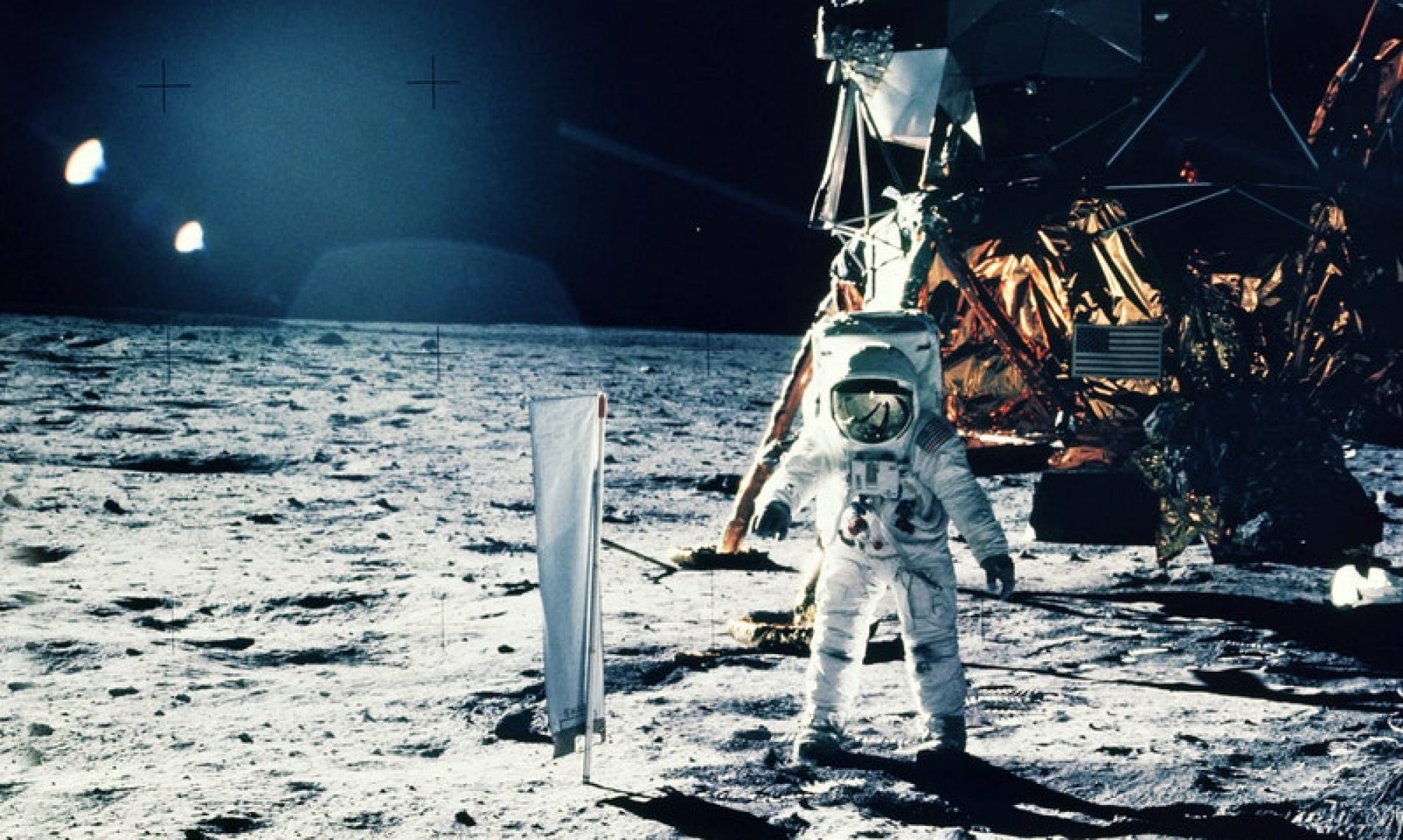
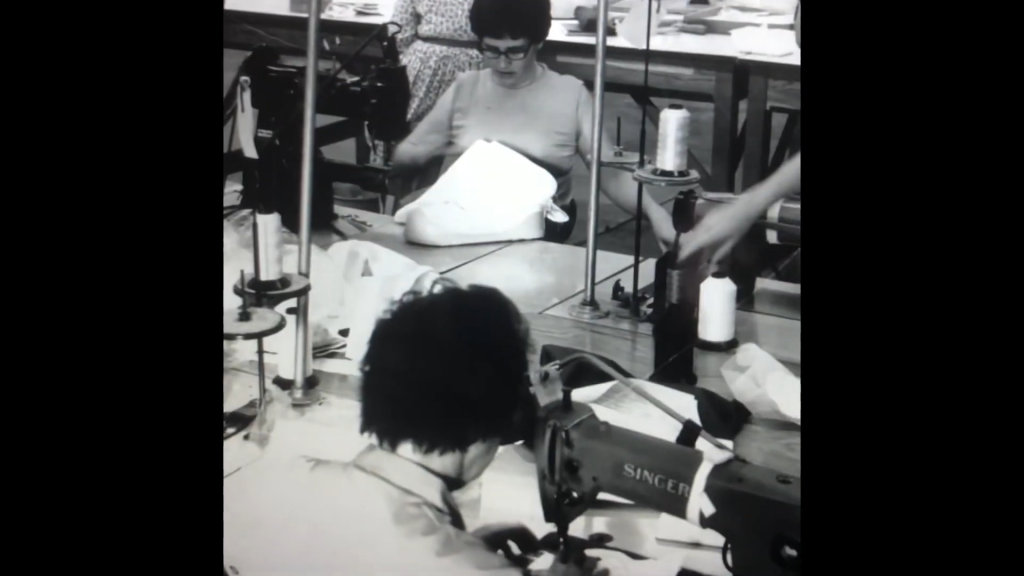
But Singer’s contribution to space exploration didn’t stop there. Singer sewing machines were integral to creating Neil Armstrong’s lunar suit, enabling him to take that historic step onto the lunar surface. Moreover, Singer’s innovative technology was used to produce thermal protective insulation for the Space Shuttle, significantly reducing its weight and enhancing safety.
From canal construction to the creation of the sewing machine, Singer’s legacy is deeply intertwined with transportation and space exploration. Join us on this incredible journey from Singer Avenue to the stars! 🚀🪡🌌 #SpaceExploration #SingerSewing #ApolloMission
Join Us Today!
Your support fuels our mission. Every click, every share, every subscription propels us further into the unknown. Join us as we continue to bring you captivating insights into the realm beyond our blue planet. We thank you for being a part of this cosmic adventure.
Embark on this journey now: Interactive Virtual Reality ISS Spacecraft Exhibit
Your support means the world to us. For just $4 a month, you can help us continue creating these interactive virtual museum exhibits. Click the link below to visit our Patreon page and be part of our mission to explore and educate about the wonders of space exploration.
Thank you for watching this video to the end. Like, subscribe, and share your thoughts in the comments below. Your support fuels our passion for space exploration. From the Spacecraft Interactive Virtual Museum team, thank you!
Sew SisterRead More about how Sewing help NASA Explore Space!